 |
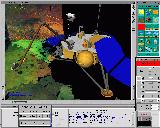
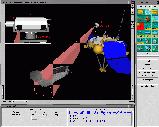
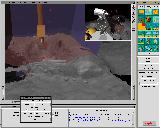
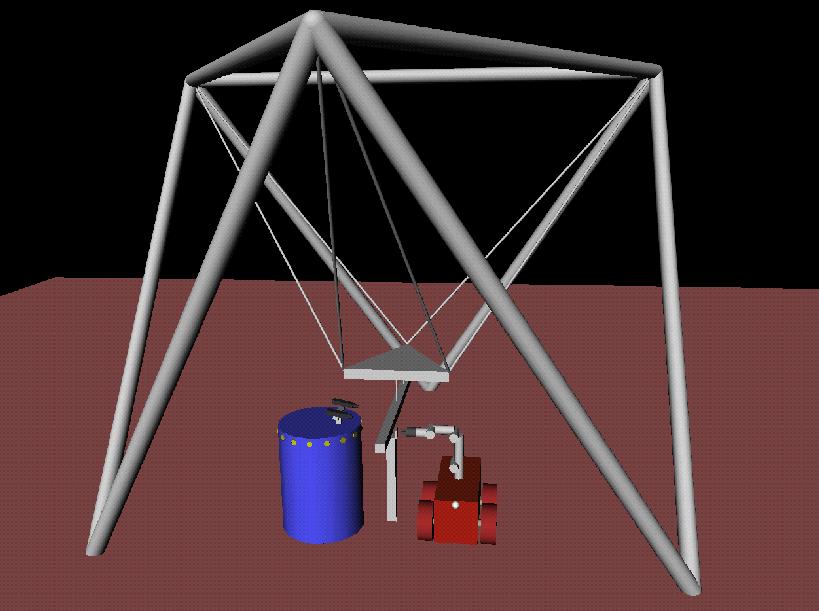
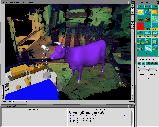
The synthetic model of the lander with the robotic
arm and the Virtual Robot interface (to simulate arm movements). Note the
color-textured meshes in the background. |
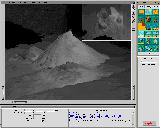   |
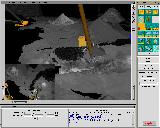
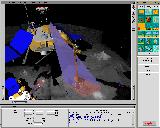
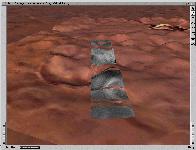
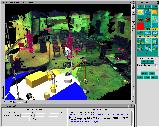
One the of the Polar Lander missions was to dig a trench. Here are
different 3D models of the pile of sand resulting from a simulated trench
dug in the sandbox during an ORT. |
  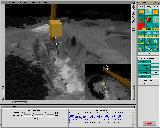   |
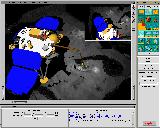
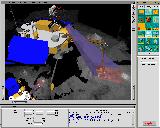
Different shots of the simulated trench. We placed the synthetic model
of the Robotic Arm to give an idea of how the trench digging was performed.
Note the yellow box on the Robotic Arm representing the Robotic Arm Camera.
We actually have the capabilities of replaying in Viz the sequences that
would be uplinked to the lander on Mars. |
     |
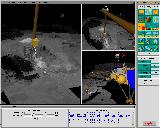
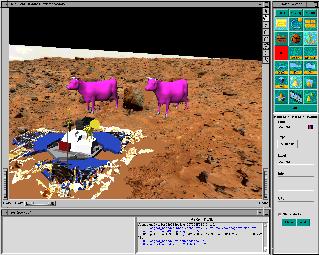
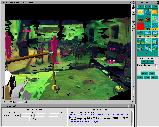
In order to help the science team plan their sequences, different tools
were implemented in Viz to represent the different characteristics of the
Surface Stereo Imager (SSI camera) such as the field of views of the left
and right eye, as well as stereo coverage (the pyramids you see in pink
and blue coming from the SSI). We could also simulate the kinematics of
the SSI, allowing us to rotate the SSI and see what would be imaged on
the ground, for instance. |
 |
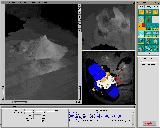
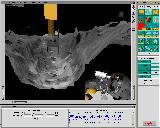
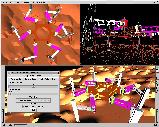
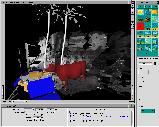
The Marsokhod Field experiment was conducted by the
Intelligent Mechanisms Group in February 99 in the Mojave desert in California.
Hundreds of stereo images were downlinked to NASA Ames (ground ops) to
be processed into 3D terrain models. The image shows how we integrated
the local dataset (in color) into a larger digital elevation map (DEM)
from USGS (upper right view). We also integrated the simulated descent
images on the DEM. The upper-left view shows the wireframe of the terrain
model. |
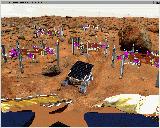 |
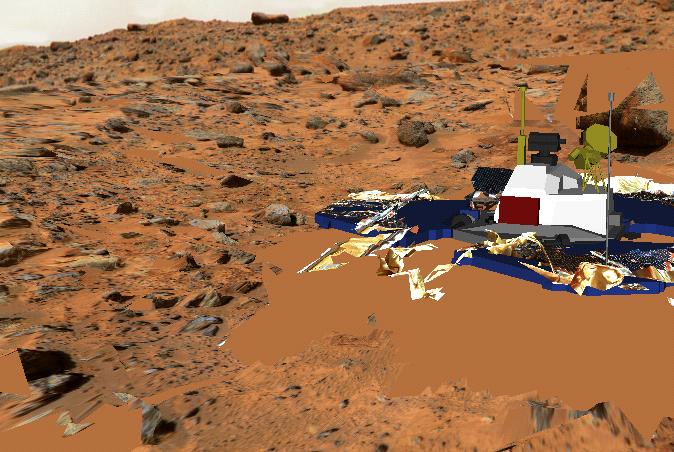
Illustration of the Robot Colony concept. This is not a corrected image.
We actually put synthetic 3D models of the walker robot on the Pathfinder
terrain. |
 |
The Autonomy and Robotics Area is developing a snake
robot. We used Viz to visualize output of snake simulations (contact
Gary Haith). |
 |
This is the Mars
South Pole demo. We integrated high-resolution MOC images (about 16m/pixel)
onto a lower resolution elevation map from Viking data. |
 |
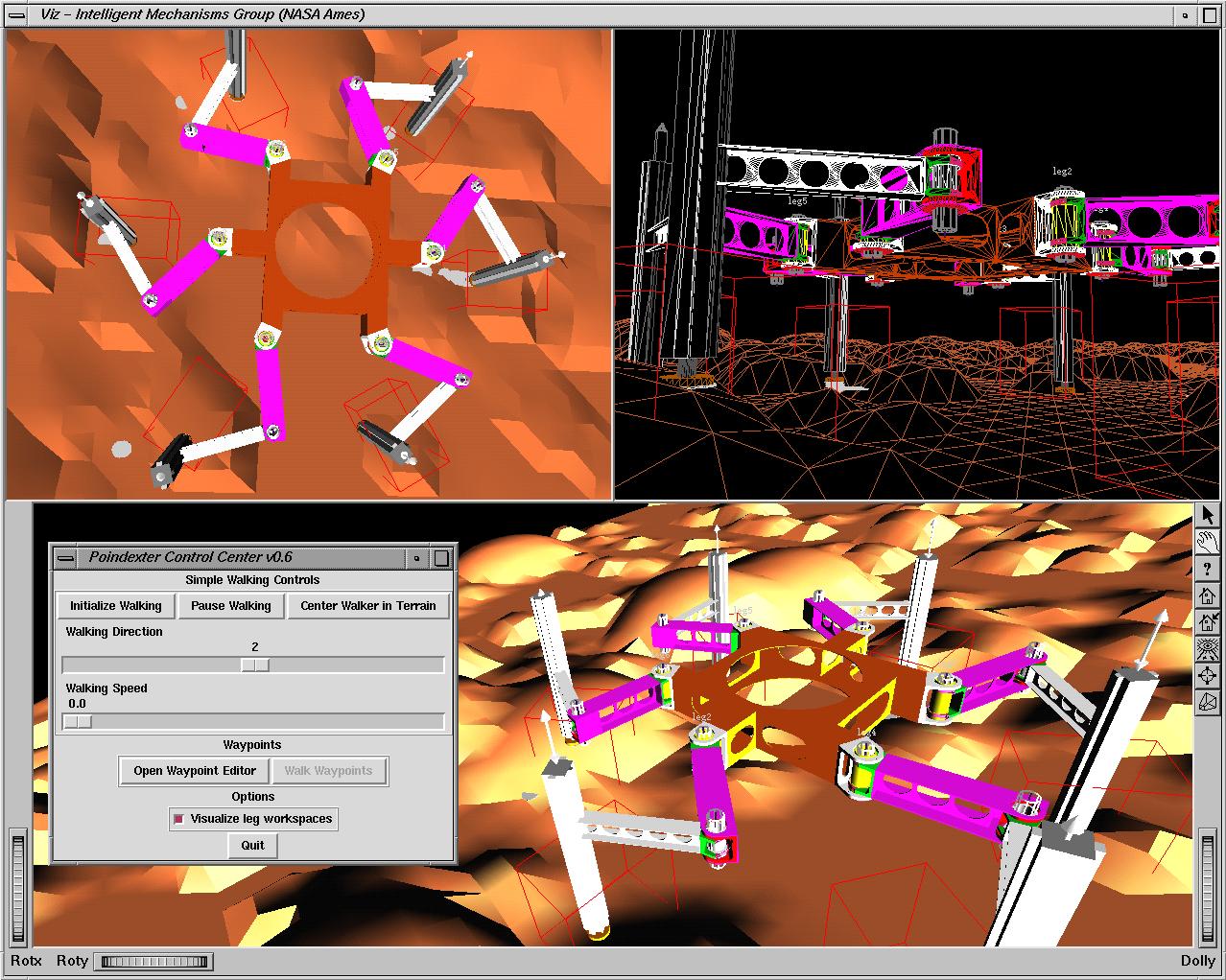
This simulation of a 6-legged robot walking on terrain was developed
by Nick Vallidis and interfaced with Viz during the summer 98. |
 |
Marion Smith
from Carnegie Mellon University is working on Distributed
Robot Architectures. |


{kind=link}