top-right toolbar: 6th button from the top (3 button from the button).
Here's a brief description of the different demos. To see an updated description, look in: viz/demos/demos.txt.
Note: if the time to load has elapsed, but nothing appears on
the screen, it might be that the viewpoint is not looking at the right
direction: the View All function allows to show what is loaded: ![]()
top-right toolbar: 6th button from the top (3 button from the button).
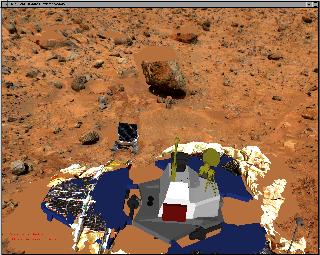 |
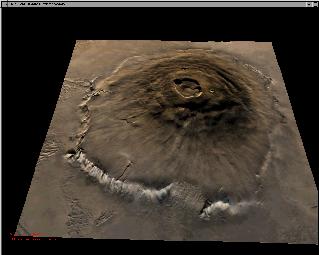
The Mars
Pathfinder local terrain. Patches are loading sequentially in the interface.
Once all patches (B/W) are loaded, the color texture will be loaded (Viz
will freeze for about 30 sec).
Time to load: 3 min. The bottom button labeled: '0' to '3' allow to switch textures. Note
that if you load a new texture for the first time, it might freeze Viz
for a couple of seconds.
|
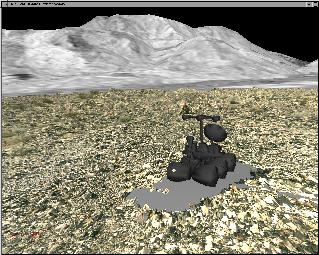 |
The Intelligent Mechanisms Group has conducted a
full-blown field experiment
with the Marsokhod
robot in January 99. This is the integrated dataset.
- Time to load: 4min 40sec
|
 |
An animation of the trench digging simulation performed
by the Mars 98 team during the Mojave
99 Marsokhod test.
- Time to load: 2min 50sec - Animation: show terrain at different stages of the digging. The pile
of dirt growing and the trench becoming deeper should be seen. Topology
is better viewed in wireframe (right mouse button, Draw Style->wireframe).
|
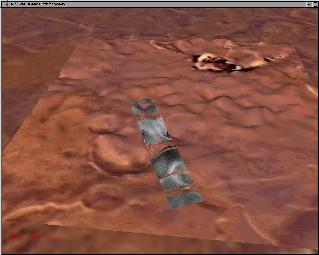 |
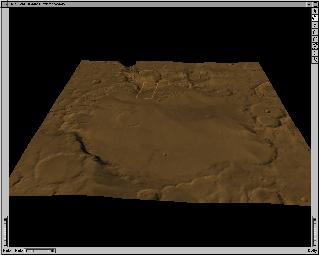
A fly-through to one of the proposed landing site
for the Mars Polar Lander. MOC
and MOLA data integrated, as well as a 10x magnified Pathfinder terrain
as an example of the local site.
- Time to load: 50 seconds. - Animation: fly-through
|
 |
- Time to load: 19 seconds. |
 |
- Time to load: 20 seconds |
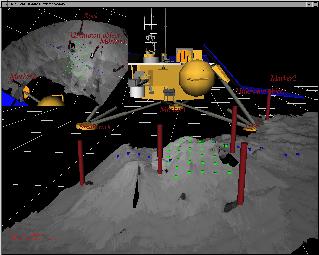 |
This is the Initial dataset from the early test with
the Surface Stereo Imager of the MVACS
Polar Lander in sandbox at UCLA.
The animation illustrate some of the capabilities in Viz:
|
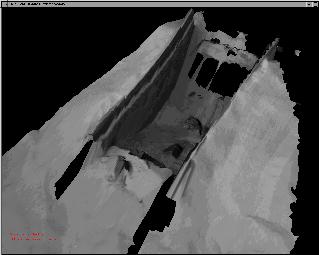 |
One of the objectives of the Mars
Polar Lander is to dig a trench.
This is a close-up of a simulated trench in the sandbox at UCLA (09-09-1999). The stereo-images used to reconstruct this 3D model were acquired using the Stereo Surface Imager. |
 |
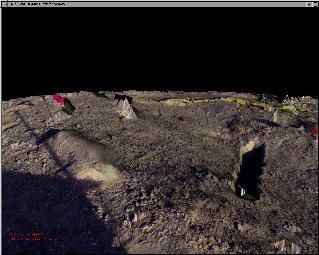
This is a full panorama acquired at UCLA during the
MVACS Operational Readiness Test 6 (November 1999) for the Mars Polar
Lander Mission. You can recognize the sandbox, which is located next
to the press conference area in the Science and Technology Research Building.
There are 3 different textures:
|
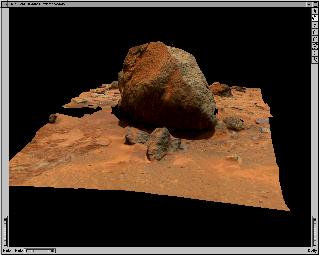 |
Yogi is one of the most attracting rocks of the Mars
Pathfinder dataset because of its size and shape.
|